Charging Zones#
Charging zones are a critical component of an FMS. These zones are linked to physical charging stations installed on-site, ensuring robots can recharge efficiently and continue their tasks without interruptions.
Mobile robots in the fleet may employ different charging methods, such as using a dedicated plug, induction plates, or other technologies. To accommodate these variations, Meili FMS allows for the configuration of docking routines tailored to specific categories of robots. This flexibility ensures seamless integration and effective energy management across diverse robot types, maximizing uptime and operational efficiency.
Zone creation#
To create a charging zone go to Maps > Map editor, then select Add zones to map on the right side of the map (square symbol). Here a pop-up window allows you to select the type of zone that you want to add, in this case select Charging zone.
Here you can set different parameters:
-
Vehicle category: only vehicles of the selected category will be allowed to reach the zone
-
Zone safety parameter: A metric values that determines the area around the charger to be shown as charging zone.
-
Docking and undocking stations: If ticked, it automatically generates a docking station outside the area. This station can be moved around the charging zone and will be used as a starting position for docking routine. The undocking station is placed on the charging point.
-
Priority: increasing the priority will make a charging zone to be preferred over other charging zones with lower priority.
-
Vehicle limit: Number of vehicles that can be assigned to the charging zone at the same time.
-
Entry preset (optional): attach a mission preset to be automatically performed when entering the zone. When creating the preset, select the docking station as a station if present.
-
Exit preset (optional): attach a mission preset to be automatically performed when moving out of the zone. When creating the preset, select the charging station as a station.
Zone position, rotation and dimension can be modified by the user at a later stage by clicking the Enable draggable button on the right side.
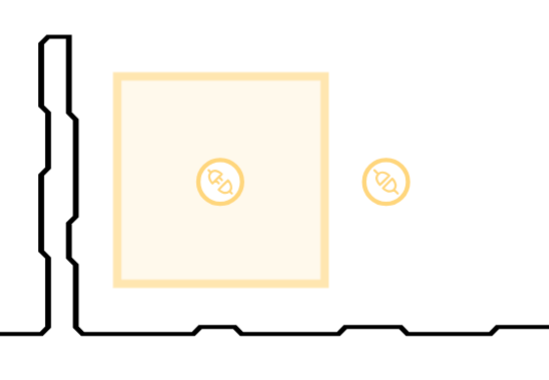
Example of charging zone with docking/undocking station

Example of standard charging zone (no dock station)
Charging zone functionality#
Charging zones are a powerful tool that can be combined with Meili FMS battery management. There are two ways to enable automatic vehicle recharging:
-
Using vehicle battery management: to enable battery management navigate to Vehicles page, select the desired vehicle by clicking on the edit icon on the right side. Select Battery tab and tick Enable battery management. Additional parameters can be set here. When the vehicle reaches the Emergency battery level, the robot will automatically go to charge.
-
Using mission management: when a robot is idle, it can be sent automatically to charge. To enable it, navigate to Site settings, in Mission management tab select Move to charging zone after timeout. The time that the robot can stay idle before going to charge can be defined in “Time to resting zone after mission” parameter.
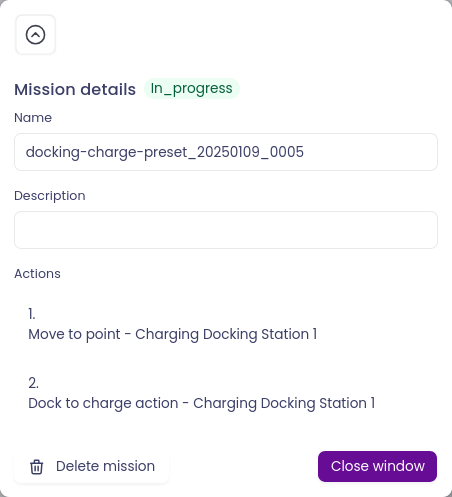
When attaching a preset to a charging zone, the vehicle will reach the docking station and perform the preset on entry. If no docking station is defined, it will perform the preset on the charging station. When moving out of the station, the robot will perform the mission preset on the charging station before moving out of the zone.
In the following example, a “Dock to charge action” has been set as a entry mission preset to be performed on charging docking station. When a vehicle is sent to charge, the system will automatically generate a move to point to get to charging docking station and let the robot perform the docking routine there. It is expected that the robot will move to the charging station autonomously.
When the vehicle is charged or it is assigned to a mission, it will first perform the “Undock from charge action” that was set as an exit preset and then move to the desired destination.
Docking routine example
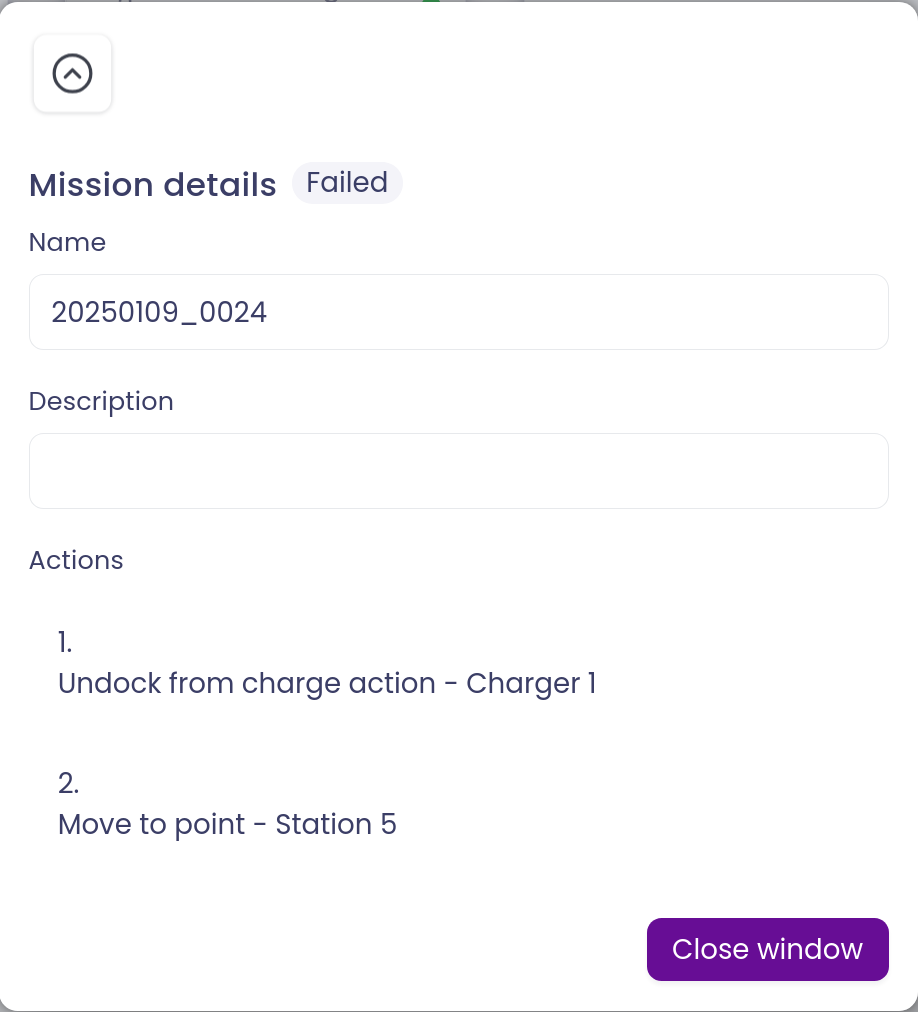
Undocking routine example