Meili Traffic Control with VDA5050 #
Meili FMS implements an advanced traffic control algorithm that allows multiple robots from multiple vendors to perform missions on the same floor while avoiding collisions and taking the best path. A detailed explanation on how Meili TC (Traffic Control) works can be found here: Traffic Control
Nodes and edges in Meili FMS #
To better understand how TC works with robots that use the VDA5050 standard, it is necessary to clearly define how Meili FMS interprets nodes and edges.
Generally a VDA node in Meili is either a station, a waypoint or a traversal node while an edge is a the path connecting stations, waypoints and traversal nodes together.
Meili subtasks have to start and end on stations: these stations will be considered as a starting node and finishing node (with a specific node identifier passed in the order message) while all the other nodes between the starting and ending stations (waypoints, traversal nodes and other stations) will be considered as “intermediate nodes” that the robot has to traverse to reach the final node.
[!INFO] Note
Free roaming: if allowed by the robot manufacturer, it is possible to activate the “free roaming” option in site settings and create missions that request the robot to move between not-connected stations. In this case the order message will contain only the final node with no intermediate points and edges and the navigation between the current position and the goal is left to the robot autonomy.
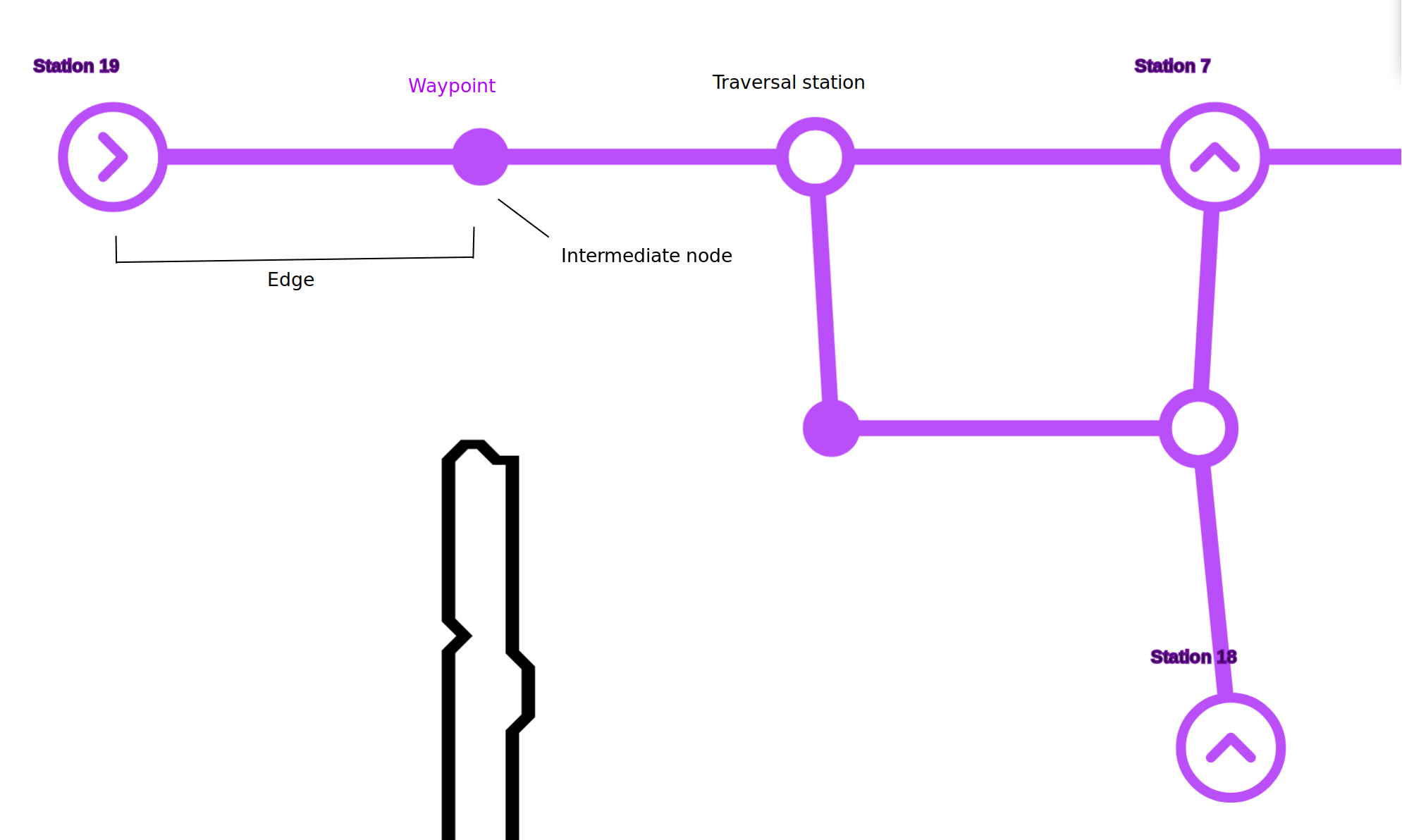
Considering the image above, an example of a subtask is a “move-to-point” from Station 19 to Station 7 and will consist of 4 nodes and 3 edges: a starting node in station 19, two intermediate nodes on the waypoint (circle filled in purple) and traversal station (circle filled in white) and a final node in station 7.
With Meili FMS, subtasks on different stations are sent with separate order update messages. Each order message has a “Base” route that connects the starting node to the finishing node where all the intermediate nodes and edges are released and can be traversed by the robot.
Traffic control #
Meili FMS offers the possibility of tweaking several traffic control parameters, allowing the user to personalize the expected behavior in different traffic situations. There are two main options that can be considered:
- Allowing multiple robots on the same path (requires robot to be able to avoid static obstacles between waypoints).
- Allow only one robot for each path.
In the first case, all the settings are explained in the Traffic Control section of Meili documentation. With VDA5050 when an intersection is detected, an instant message “startPause” will be sent to the robot with the lower priority. When the possible collision situation is cleared, then a “stopPause” instant message will be sent.
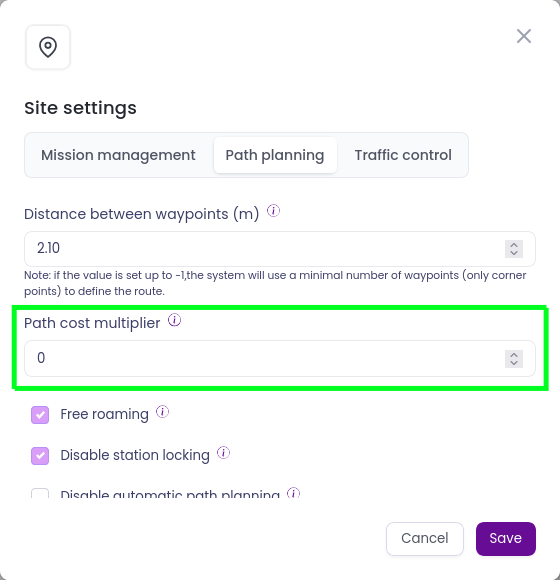
In the second case, the “Path cost multiplier” setting (under path planning) can be used. By increasing the value of the setting, the FMS will assign a path that avoids to use paths that are already being used by other robots. In case only one path is available it will wait until the path is cleared before sending the mission. In case of possible collisions with other vehicles, the first case will be applied.