Capacity Zones#
Capacity zones are user defined zones which purpose is to limit the number of vehicles that can operate in a specific area of the map (for instance a narrow corridor). The working principle of these zones is similar to the one of a traffic light: when the number of vehicles in the zone reaches the vehicle limit, then no other vehicles will enter and upcoming vehicles will be stopped at the entry station of the zone. When the vehicle limit is not reached, vehicles are allowed to enter the capacity zone.
Zone creation#
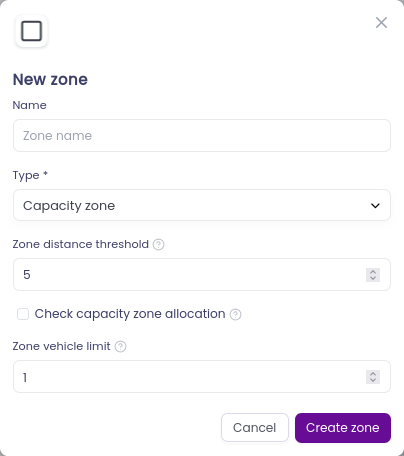
To create an capacity zone go to Maps > Map editor, then select Add zones to map on the right side of the map (square symbol). Here a pop-up window allows you to select the type of zone that you want to add, in this case select Capacity zone and place it on the map in the desired position. Zone position, rotation and dimension can be modified by the user at a later stage by clicking the Enable draggable button on the right side.
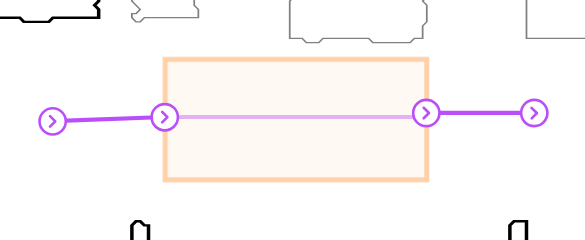
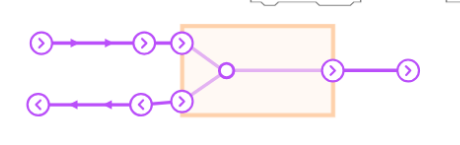
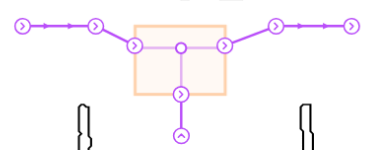
When a capacity zone intersects a path, an entry and exit station will be automatically created at the intersection. These stations are used by the system to stop robots at the capacity zone entrance when needed.
Capacity zone parameters#
There are three main parameters that are important when setting up a capacity zone:
-
Vehicle limit: number of vehicles that can be inside the zone at the same time
-
Threshold distance: a parameter in meters that determines at what distance the system has to check for other vehicles entering the same capacity zone.
-
Check capacity zone allocation: if set to true, the system will set the task to “rerun” and wait for the capacity zone to have enough space before sending the mission to the robot.
Note: In case of multiple vehicles within the threshold distance that are moving towards the capacity zone, the one with higher task priority will be allowed to enter the capacity zone first.
Capacity zone functionality#
In Meili-FMS when allocating a task which path is passing through a capacity zone, the system will automatically generate a “wait for capacity” subtask at the entry station of the capacity zone. This subtask is at a system level and won’t be sent to the robot. When the robot is allowed to enter (green light) the subtask will be mark as completed and the robot will receive a message containing the next subtask. When a vehicle is not allowed to enter the capacity zone (red light), the “wait for capacity” subtask will be shown as running until the capacity zone has space for the robot.
The FMS will not send a pause and resume message to the vehicle to stop it at the entry station, it will instead split the order in separate messages to allow the system to have a better control over traffic.
Example of capacity zone layouts#