Action Zones#
Action zones are user defined zones which purpose is to allow automatic execution of mission presets based on vehicle location. The triggering location of said presets can be visually determined by action stations and can be changed by editing zone parameters (dimension and position).
Zone creation#
To create an action zone go to Maps > Map editor, then select Add zones to map on the right side of the map (square symbol). Here a pop-up window allows you to select the type of zone that you want to add, in this case select Action zone and place it on the map in the desired position. Zone position, rotation and dimension can be modified by the user at a later stage by clicking the Enable draggable button on the right side.
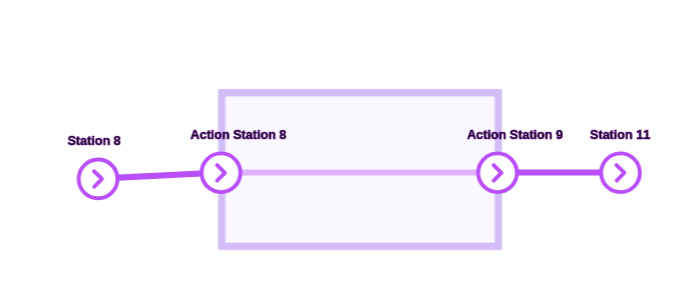
When an action zone intersects a path, an entry and exit station (called Action Station) will be automatically created at the intersection. For each path intersecting the zone, two action stations will be created at the intersections.
Action zone parameters and presets#
Each action zone created on the map can be attached with a specific entry preset and exit preset. These presets are missions that can be defined by the user and are automatically executed when a vehicle is entering or exiting the action zone.
Each action zone can have two attached mission presets that will be executed upon interaction as follows:
-
Entry mission preset (optional). This preset is executed as the robot enters the action zone. If the robot enters the same zone multiple times, the preset will be executed each time this happens. The robot will wait in the specific action station until the entirety of the entry preset has been executed.
-
Exit mission preset (optional). This preset is executed as the robot exits the action zone. If the robot exits the same zone multiple times, the preset will be executed each time this happens. The robot will wait in the specific action station until the entirety of the exit preset has been executed.
Warning: The mission preset stations will be overridden as they are converted to missions. The new stations will be the action stations related to the action zone. They are dynamically assigned based on the relative position of the robot to the action zone (entering/exiting).
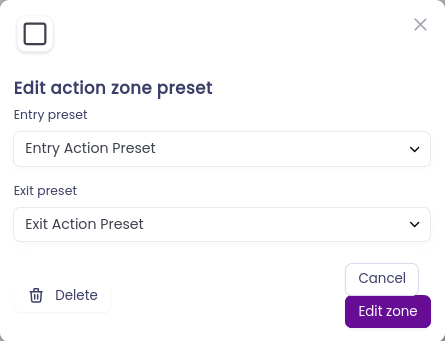
To attach a preset to a station go to Map editor page and click on the desired action zone. Here a pop-up window will appear where the entry and exits presets can be selected from a drop down list. The drop down list contains the missions that have been defined in the Mission presets page. (In the image Entry Action Preset and Exit Action Preset have been defined as a “Blink” action for n seconds)
Action Zone Functionality#
The presets for action zones are automatically included in the missions when created: if a mission requires the robot to pass through the zone, then the entry and exit presets, if present, will be attached to the mission. As an example, consider an action zone between station 8 and station 11. The entry and exit presets are both “blink” actions. We want to send the vehicle from station 8 to station 11.
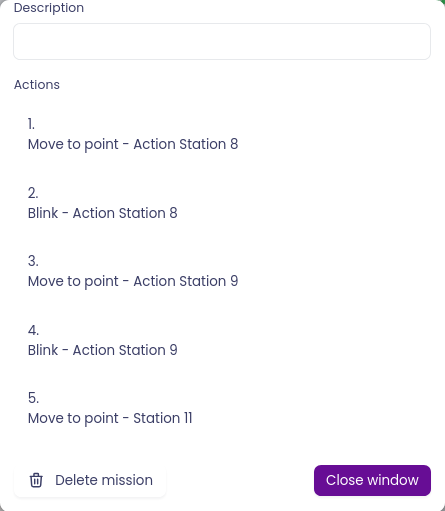
The resulting mission generated by the system will look as follows:
Info: Action zones are particularly useful when combined with IoT devices. Create a dedicated entry preset to control devices such as gates or doors and let the FMS to automatically open and close them when a vehicle is approaching them