Site settings parameters #
Site settings can be reached in two ways:
-
Inside “Manage Organisation/Members/Teams/Team Name”.
-
When you are inside your team, by clicking in the upper right corner to the “profile button” and then “Team site settings” as shown below.
Whether you access through “Manage Organisation” or “Profile Button”, you will reach the following page, where you can find the “Site settings” button in the upper right corner.
When clicking on Site Settings, you will see three separate pages, each containing different types of settings:
- Mission Management – Parameters related to general mission execution
- Path Planning – Parameters related to path generation and navigation
- Traffic Control – Parameters related to traffic flow and coordination
1. Mission Management #
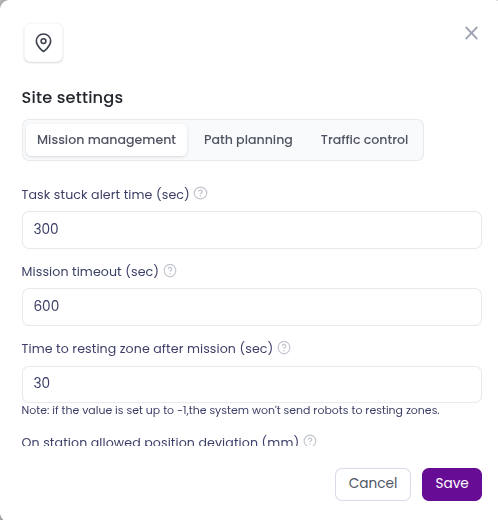
The following parameters can be configured:
| Setting | Description |
|---|---|
| Task Stuck Alert Time (sec) | Time (in seconds) before the user is notified about a robot disconnecting while it has an active task. |
| Mission Timeout (sec) | Duration (in seconds) a task can remain inactive before it is terminated or the user mini-menu appears. Inactivity is based on the most recent subtask creation or execution start time. |
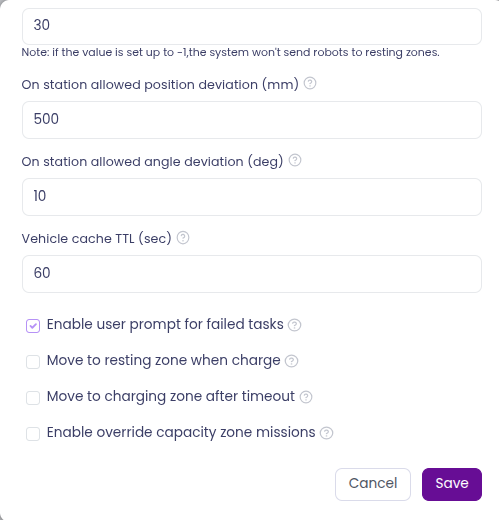
| Time to Resting Zone After Mission (sec) | Delay before the robot is sent to a resting zone after completing a task. If set to -1, the robot won’t be sent to any resting zone. |
| On Station Allowed Deviation (mm) | Maximum distance allowed between the robot and the station for it to be considered “on station.” |
| Vehicle Cache TTL (sec) | How long (in seconds) the system caches vehicle details like location, speed, and battery level. |
| Enable User Prompt for Failed Tasks | If enabled, the user will be prompted to decide what to do with failed tasks (e.g. aborted, terminated, vehicle offline). If disabled, such tasks will be marked as failed automatically. |
| Move to Resting Zone When Charged | If enabled, robots will move to a resting zone after charging. If disabled, they will remain in the charging zone. |
| Move to Charging Zone After Timeout | If enabled, robots will move to a charging zone after timing out. If disabled, they will move to a resting zone instead. |
| Enable Override Capacity Zone Missions | If enabled, vehicles exceeding capacity zone limits can override the restriction. |
2. Path planning #
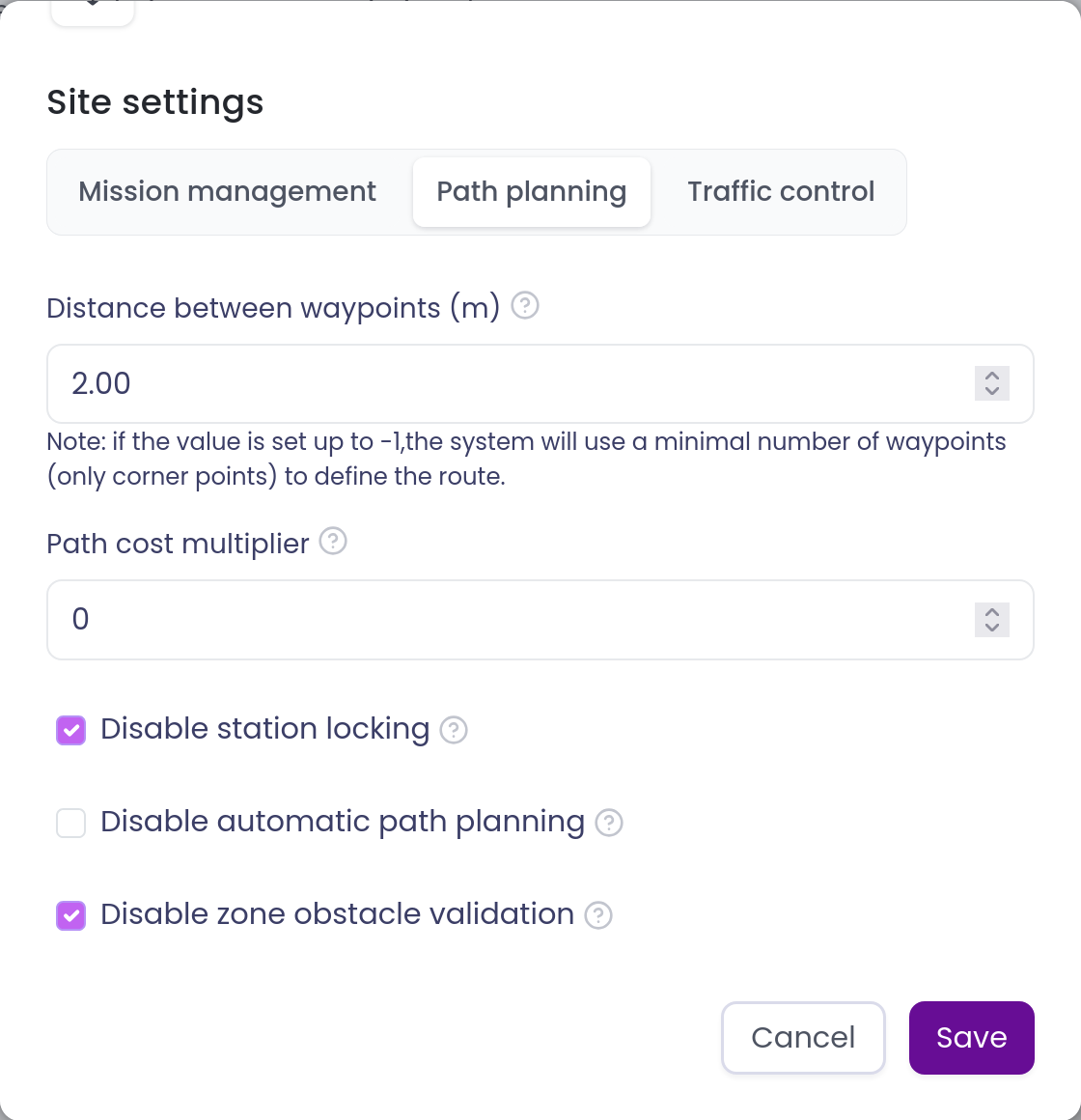
The following parameters can be configured:
| Setting | Description |
|---|---|
| Distance Between Waypoints (m) | Determines the distance between waypoints within a path, in metres. If set to -1, the system will use the minimal number of waypoints (only corner points). |
| Path Cost Multiplier | If set above 0, increases the cost of sending a mission along a path already in use. A value of 10 effectively prevents reuse of the same path. |
| Disable Station Locking | Allows multiple tasks to be assigned to the same station at the same time. |
| Disable Automatic Path Planning | Disables Meili’s built-in path planner. This also disables automatic obstacle avoidance. |
| Disable Zone Obstacle Validation | Allows zones to be created on top of known obstacles on the map. |
3. Traffic control #
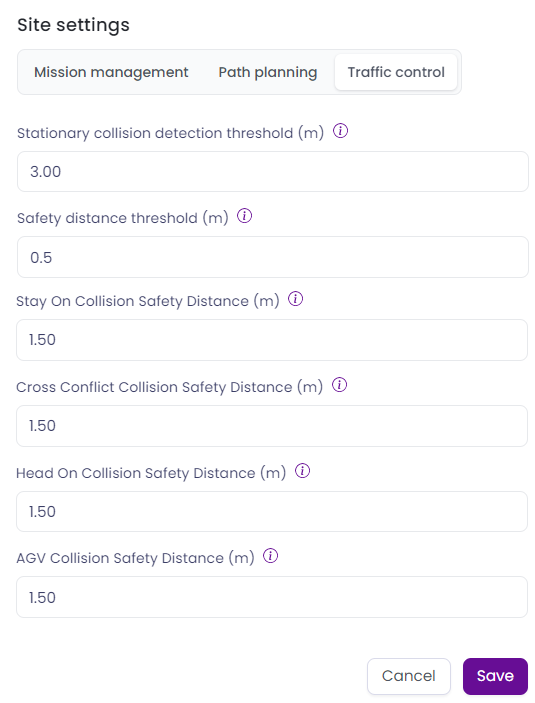
The following parameters can be configured:
| Setting | Description |
|---|---|
| Enable Traffic Control | Enables or disables traffic control logic. |
| Enable Capacity Zone Traffic Control | Enables or disables traffic control specifically within capacity zones. See the Capacity Zones Guide for more information. |
| Safety Distance Threshold (m) | Minimum safety distance to be maintained between vehicles and obstacles. |