Mission timeouts#
This page describes the expected behavior regarding tasks and their associated timeouts.
System Timeouts#
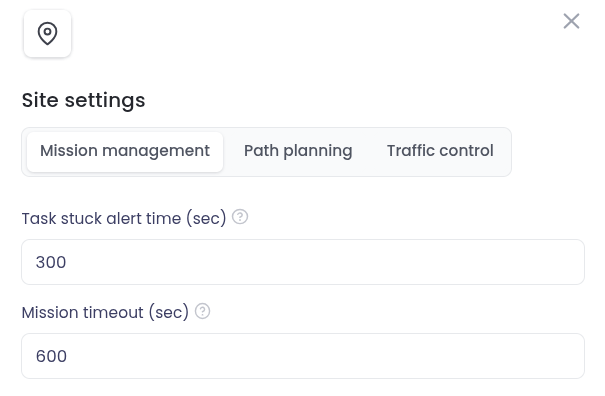
There are two timeouts related to tasks that need to be specified. If a task does not change its status within a certain time, following timeouts may be triggered:
- Alert timeout – After this period, a notification is sent to the user.
- Mission timeout – After this period, an action must be taken regarding the task.
Behavior#
For any tasks in the created, in_progress, rerun, or sent states, if a task doesn’t change its status for a certain amount of time, the system will:
- After
alert_time– Notify the user. - After
timeout_time– Change the task state toawait_terminate, and prompt the user to decide what should happen to the task.
Mini-Menu Conditions#
A task enters the mini-menu (user prompt state) under the following conditions:
- The task has been terminated – due to a timeout (as described above).
- The task has been aborted – the vehicle reported it is no longer moving.
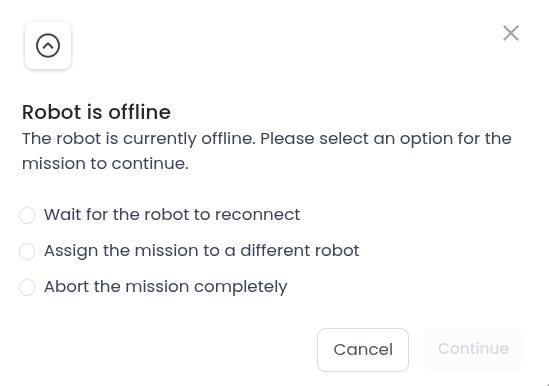
- The vehicle has gone offline.
In all of these cases, the user is notified. The system will then wait indefinitely for the user’s input.
The exception is when the vehicle reconnects — in that case, it immediately resumes task execution.
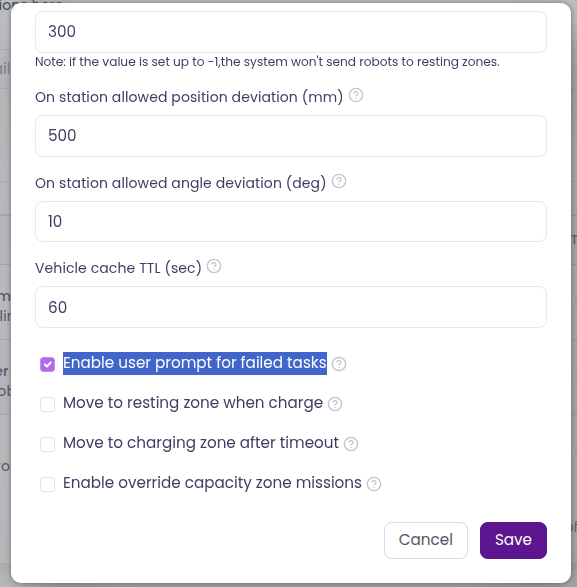
Disable Mini-Menu#
An option in team settings is introduced to enable or disable the user mini-menu. If this option is enabled, the mini-menu will be shown. Otherwise, tasks will be automatically failed, terminated, or aborted after the timeout_time. This option is enabled by default.
For tasks that go offline → if the feature is disabled, the mini-menu will be shown only for the duration of timeout_time. After this time, the task will be marked as failed.
Other Notes#
AWAIT_TERMINATE Status and Robot Behaviour#
When a task enters the await_terminate state, it does not directly affect the robot’s behaviour — it simply prompts the user to decide what should happen next.
A common scenario is when a robot becomes stuck and attempts to recover for longer than the defined mission timeout. In such cases, the robot may continue trying to recover independently. Meanwhile, the system notifies the user and prompts them to take action. In some instances, the task may successfully complete without any user intervention.
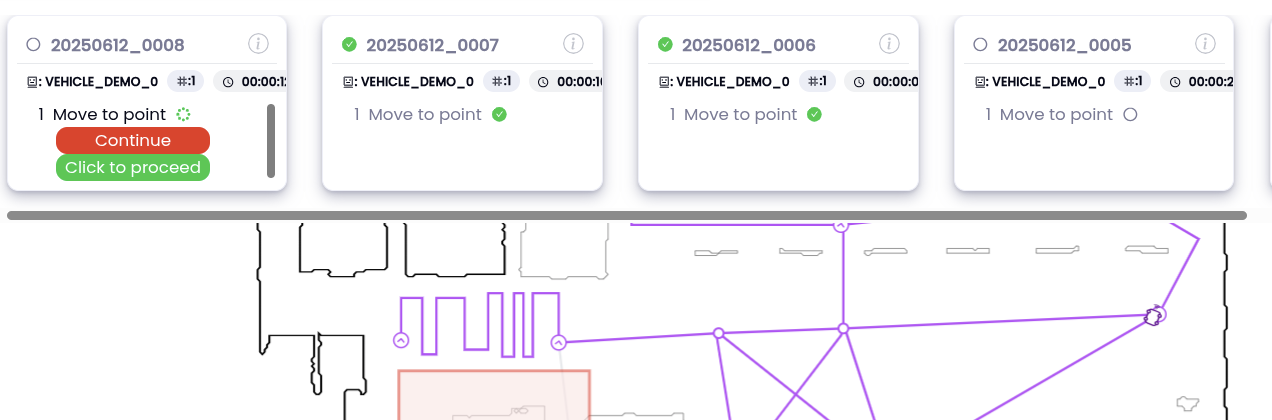
This may result in a GUI state, where user can both proceed and cancel the task.