Running#
In order to execute the integration, the main.py file located in the parent folder from the cloned repository have to be launched:
cd <path_where_integrations_repository_will_be_downloaded>/youibot
python3 main.pyUsage#
synchronisation#
First of all, it is needed to synchronize Meili FMS with Youibot. This is done by going to the Maps screen in Meili FMS and clicking in “Send map updates to the robot”:
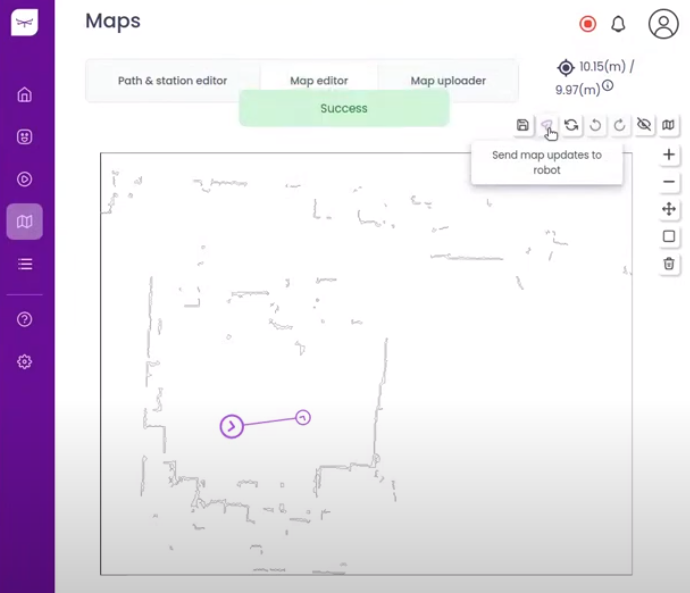
Once the synchronisation is done, stations and paths created in Meili FMS will be created in the robot internally.
Actions#
Main Youibot actions (move to point, rotate robot, rotate shelf, lift shelf, follow up) are integrated into the Meili FMS. However, Youibot offers plenty of actions that can be configured as missions within the Youibot UI and exported to Meili FMS increasing the default integrated action set.
Youibot actions integrated in Meili FMS#
This section shows the actions that can be directly configured from Meili FMS to control the Youibot robot.
- Move to point: Robot goes to the desired station. This action can be directly selected when creating Missions from Meili FMS.
The following actions need to be created from Meili FMS:
-
Go to Actions page
-
Inside actions page, go to Action definitions page
-
Create new action definition by clicking in the upper right button “+ Action definition”
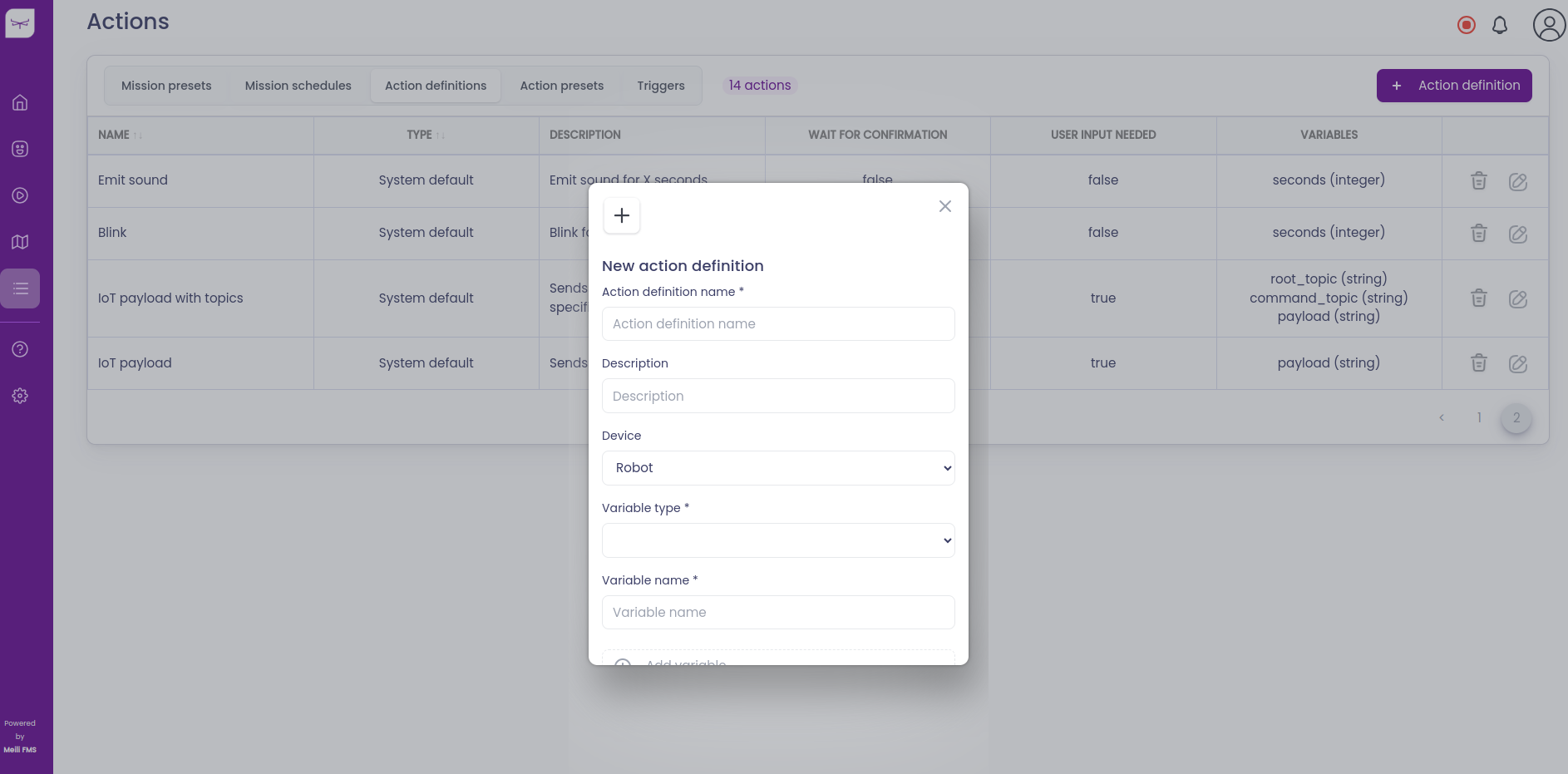
- Then, you will have to fill the action definition name, the variable type and the variable name as shown in the following picture for showed actions:
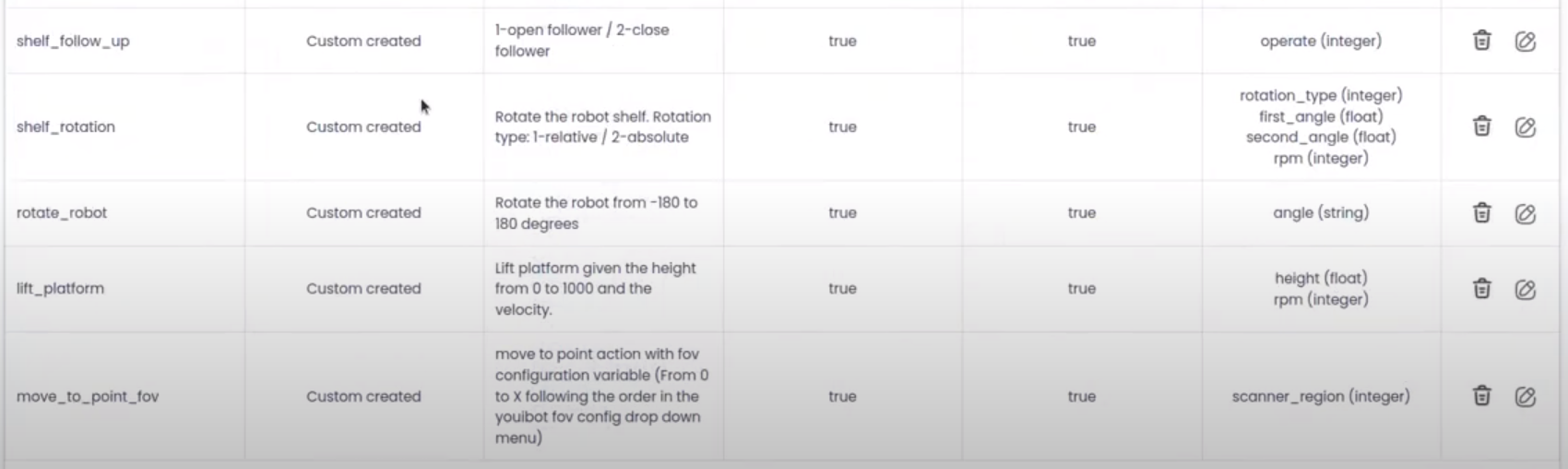
| Action definition name | Description | Variable type | Variable name |
|---|---|---|---|
| shelf_follow_up | 1 - open follower 2 - close follower |
integer | operate |
| shelf_rotation | Rotation type: 1 - relative 2 - absolute |
integer float float integer |
rotation_type first_angle second_angle rpm |
| rotate_robot | Rotation range: [-180; 180] deg |
string | angle |
| lift_platform | Height range: [0; 1000] |
float integer |
height rpm |
| move_to_point_fov | Move to point action with fov config variable. From 0 to X following the order in the youibot fov config drop down menu. | integer | scanner_region |
Once previous actions have been created, the action definition page should look as the following picture:
Finally, you will be able to use this actions directly from Meili FMS when running any mission.
Integrate new Youibot actions in Meili FMS#
Youibot has many other actions that are not integrated directly in the Meili FMS.
-
Create a mission in Youibot UI with the desired action to be performed not supported directly by Meili FMS (It can be a mission with one or multiple actions).
-
Once the mission is created, click the “Send robot status update” button in the Maps page in Meili FMS as shown in the synchronisation section.
-
Then, you will be able to visualize the missions created in Youibot UI in Meili FMS Action page under the Mission Presets page:
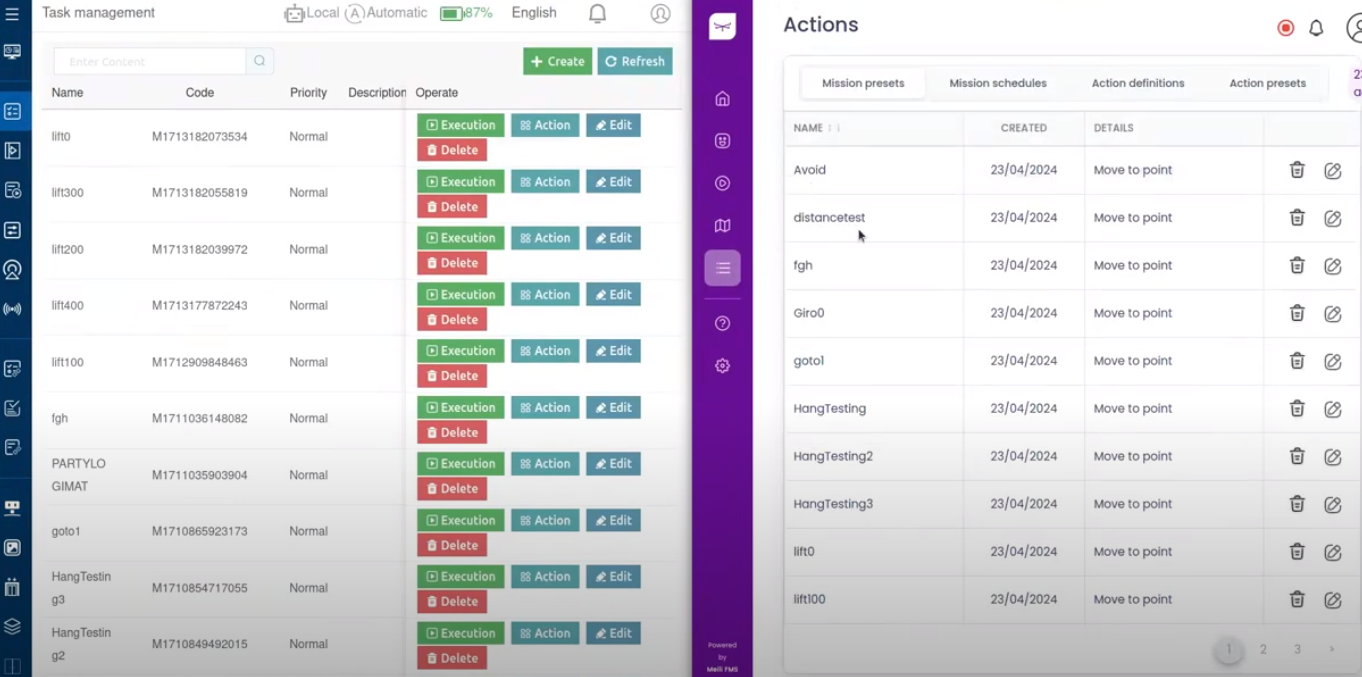
As can be seen, missions defined in Youibot UI as lift0, lift100, goto1, fgh, … are loaded into Meili FMS.
- Finally, you can run the mission defined in Youibot and loaded in Meili FMS as a mission preset as shown below:
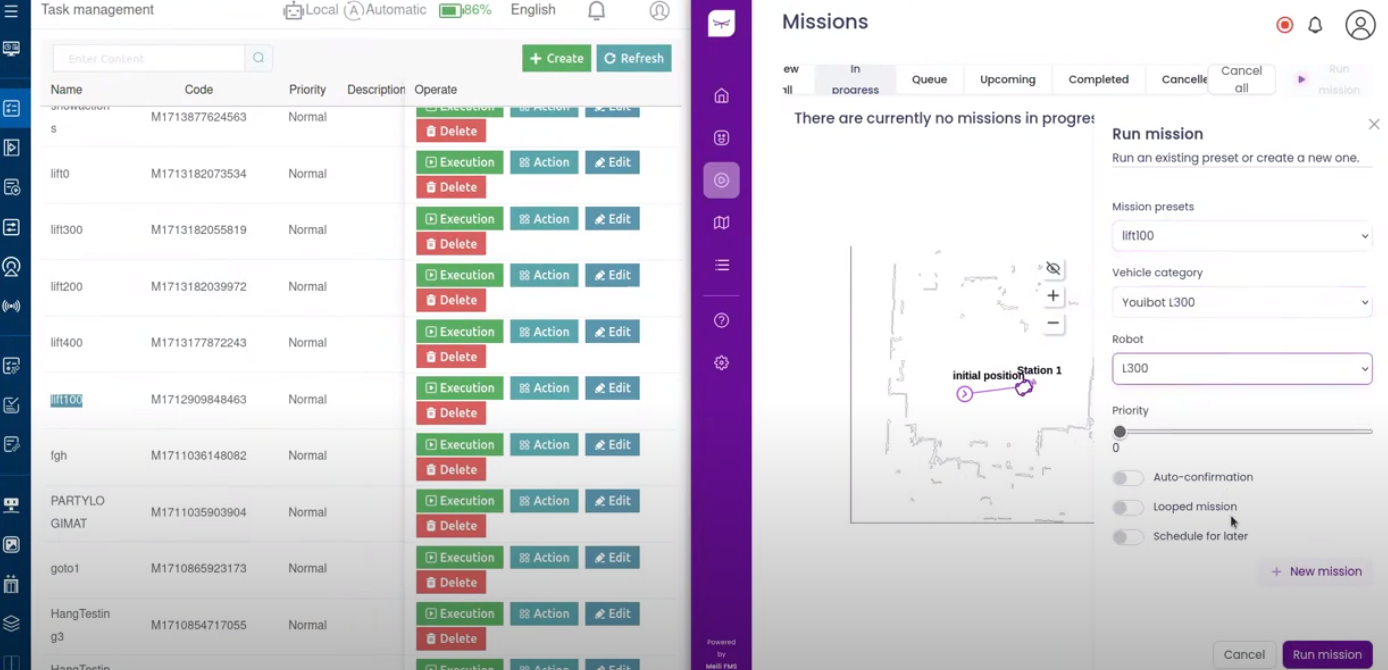
As can be seen, lift0 mission defined in Youibot UI and loaded into Meili FMS can be executed as a black box, running the defined actions inside the mission.