Running#
In order to execute the integration, the main.py file located in the parent folder from the cloned repository have to be launched:
cd <path_where_integrations_repository_will_be_downloaded>/wewo
python3 main.pyUsage#
synchronisation#
First of all, it is needed to synchronize Meili FMS with Wewo. This is done by going to the Maps screen in Meili FMS and clicking in “Send map updates to the robot”:
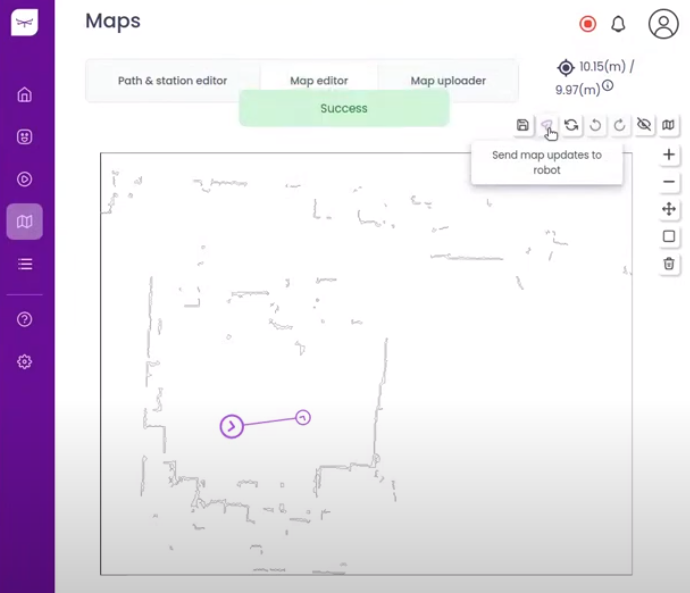
Once the synchronisation is done, stations created inside the Wewo will appear on the FMS map. It is not possible to send stations from Meili FMS to Wewo.
In order to be able to trigger traffic control, stations must be connected inside the FMS. Check here how to connect stations.
Actions#
The available actions for the Wewo robot are:
- Move to station
- Pick up cart
- Place cart
- Wait X seconds
Move to station and Wait X seconds actions can be directly selected when creating Missions from Meili FMS. The other two can be created Actions->Action definitions page. The names must be “pickup_cart” and “place_cart” respectively and no variables are needed. Check here how to create actions.