Running#
In order to execute the integration, the main.py file located in the parent folder from the cloned repository have to be launched:
cd <path_where_integrations_repository_will_be_downloaded>/mir
python3 main.pySynchronisation#
First of all, it is needed to synchronize Meili FMS with MiR. This is done by going to the Maps screen in Meili FMS and clicking in “Send map updates to the robot”:
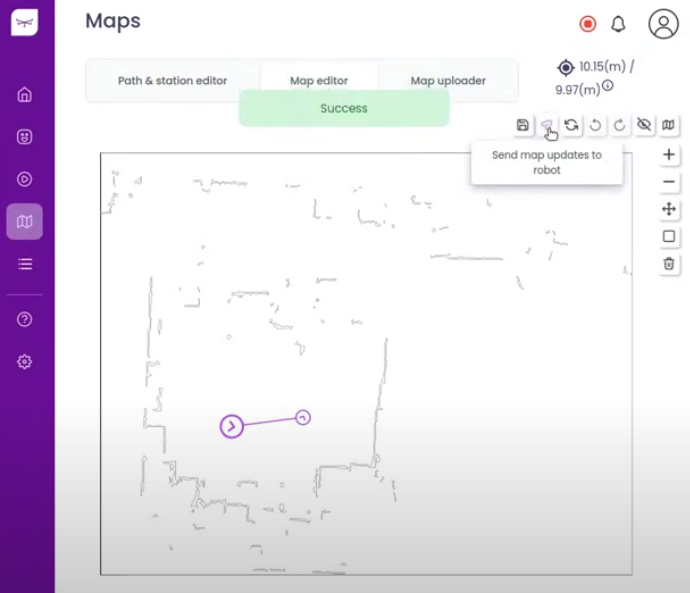
Once the synchronisation is done, stations and paths created in Meili FMS will be created in the robot internally, and the stations created in the robot will be created in Meili FMS.
Actions#
To be able to perform all the different actions that MiR can do, it is needed to create the actions in Meili FMS. The following actions need to be created from Meili FMS:
-
Go to Actions page
-
Inside actions page, go to Action definitions page
-
Create new action definition by clicking in the upper right button
+ Action definition
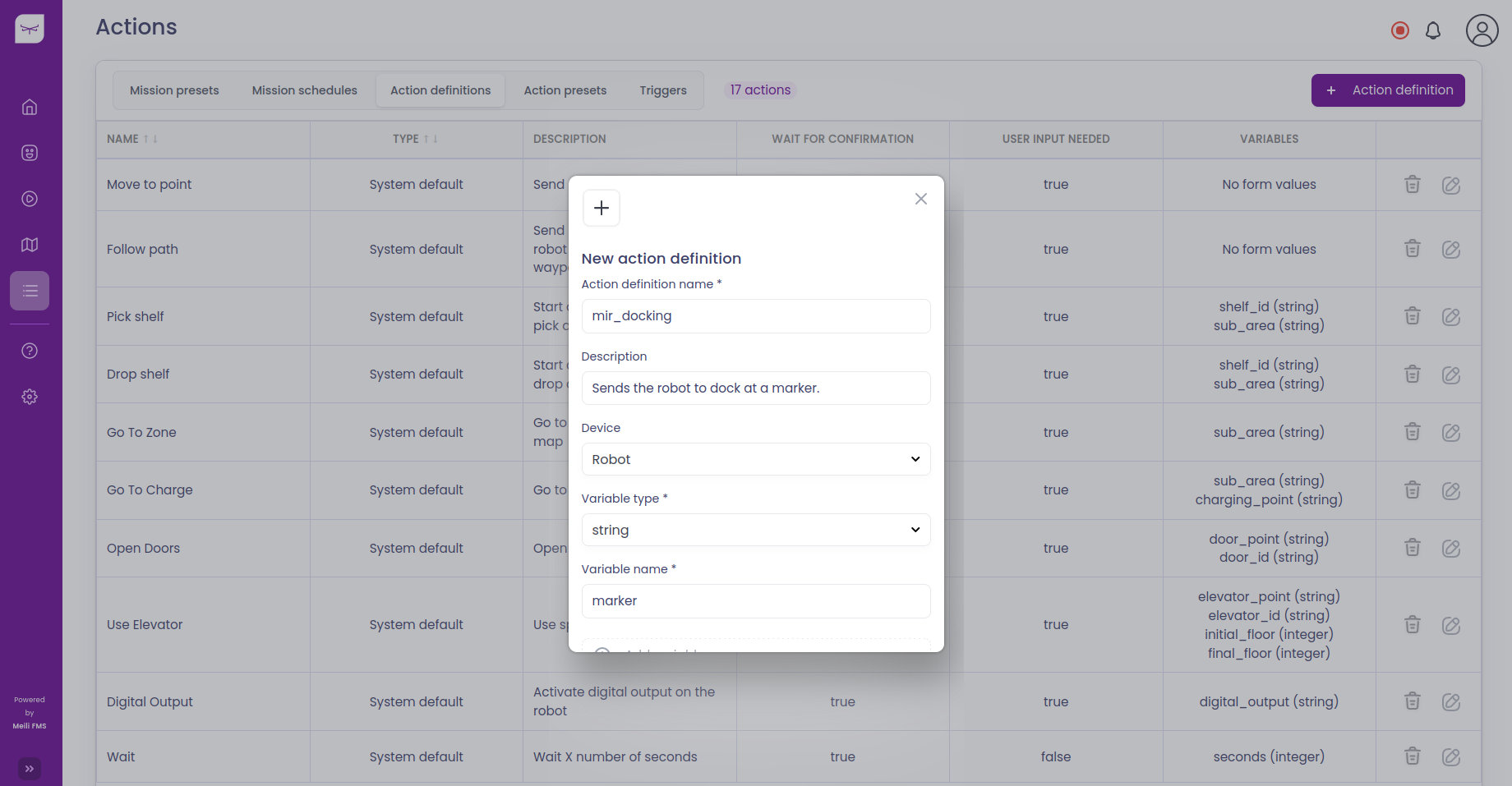
- Then, you will have to fill the action definition name, the variable type and the variable name as shown in the following picture for showed actions:
| Action definition name | Description | Variable type | Variable name |
|---|---|---|---|
| move_to_point | Defines a map position for the robot to move to. | integer string string string string integer float |
priority position_uuid cart_entry_position main_or_entry_position marker_entry_position retries distance_threshold |
| mir_charging | Sends the robot to a charging station for automatic battery recharge. | string float bool |
minimum_time minimum_percentage charge_until_new_mission |
| move_to_position | Moves the robot to a specified X, Y position on the map. | float float float integer float |
x y orientation retries distance_threshold |
| mir_docking | Sends the robot to dock at a marker. | string string integer float |
marker marker_type retries max_linear_speed |
| mir_pickup_cart | Moves to a position and picks up a cart. | string string |
position cart |
| mir_place_cart | Places the attached cart at a specific position. | string string string string |
position release_cart reverse_into_place reverse_path |
| mir_sound | Plays a specified sound (beep, horn, voice) during a mission. | string float string string |
sound volume mode duration |
| mir_sound_stop | Stops playing sounds. |
More actions are being developed and will be available soon.
Finally, you will be able to use this actions directly from Meili FMS when running any mission.